


Ресурсы
![]() 500 Схем для радиолюбителей - Часть 4 - Источники питания
500 Схем для радиолюбителей - Часть 4 - Источники питания
![]() Проектирование цифровых устройств Том 1 Джон Ф Уэйкерли
Проектирование цифровых устройств Том 1 Джон Ф Уэйкерли
![]() Самоучитель по устранению сбоев и неполадок домашнего ПК
Самоучитель по устранению сбоев и неполадок домашнего ПК
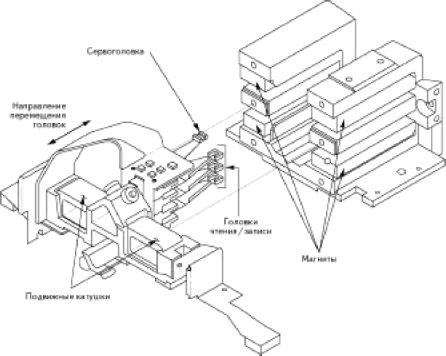
![]() Устройства магнитного хранения данных
Устройства магнитного хранения данных
![]() Номенклатура и аналоги отечественных микросхем
Номенклатура и аналоги отечественных микросхем
|
|
ТОП 10
1. Карманный справочник по электронике
2. Цифровая схемотехника
3. Азбука разработчика цифровых устройств
4. sPlan или RusPlan v.6.0.0.1
5. Основы теории цепей
6. Основы языка VHDL
7. Справочник по полупроводниковым приборам
8. UNILOGIC - Логический анализатор для PC
9. Программирование однокристальных микропроцессоров
10. Справочник по расчету параметров катушек индуктивности
1. В 3D-принтере лазер заменили солнечным лучом
2. Нановолокна упростят лечение рака
3. Квантовый компьютер: IBM переходит к практике
4. Конференции «Форум разработчиков цифровой электроники»
5. Магнитогорские андроиды завоюют российский рынок
6. Создана "глушилка" болтунов, теперь там где надо будет тихо
7. Создан компактный ветрогенератор на пьезоэлементах
8. Робот-гепард поставил рекорд скорости
9. Механическая рука DARPA удивляет ловкостью
10. Создан пульт дистанционного управления мозгом